CoboTank
Robotergestützte Automatisierung der Beladung von Binnentankschiffen
Entwicklung und Erprobung kollaborativer und automatisierter Robotersysteme zur Unterstützung des Beladevorgangs von Tankschiffen

Die fortschreitende Automatisierung der Binnenschifffahrt ist nur zielführend, wenn diese ganzheitlich betrachtet wird. Der Stellenwert des Flüssiggutumschlags in deutschen Binnenhäfen wird hierbei oft vernachlässigt. Aktuelle Beladeprozesse von Binnentankschiffen sind mitunter von manueller, körperlich anstrengender und fehleranfälliger Arbeit geprägt. In der TASCS-Studie wurden zudem die physische und psychische Belastung der Bordbesatzung im Bereich des Flüssiggutumschlags als besonders herausfordernd identifiziert.
Eine weitere Herausforderung stellt die rechtliche Lage dar. Sowohl technische Änderungen am Schiff als auch Änderungen der schiffsbetrieblichen Abläufe werden mitunter durch unterschiedliche Verordnungen verhindert. Grundsätzlich muss die Hoheit über die Prozesse an Bord bis auf Weiteres bei der Bordbesatzung liegen, wodurch die Vollautomatisierung behindert wird. Eine Automatisierung ist somit nur landseitig möglich.
Angesichts der bevorstehenden Verbreiterung des Angebotsportfolios der Tanklagerstandorte, die künftig Mineralölprodukte, synthetische Kraftstoffe, Chemieprodukte und Wasserstoffderivate lagern, sind bisherige Lösungen gar nicht oder nur unter erheblichem Aufwand nutzbar. Der daraus resultierende, große Bedarf an zukunftssicheren, automatisierten Lösungen im Bereich des Flüssiggutumschlags wird mit diesem Vorhaben adressiert.
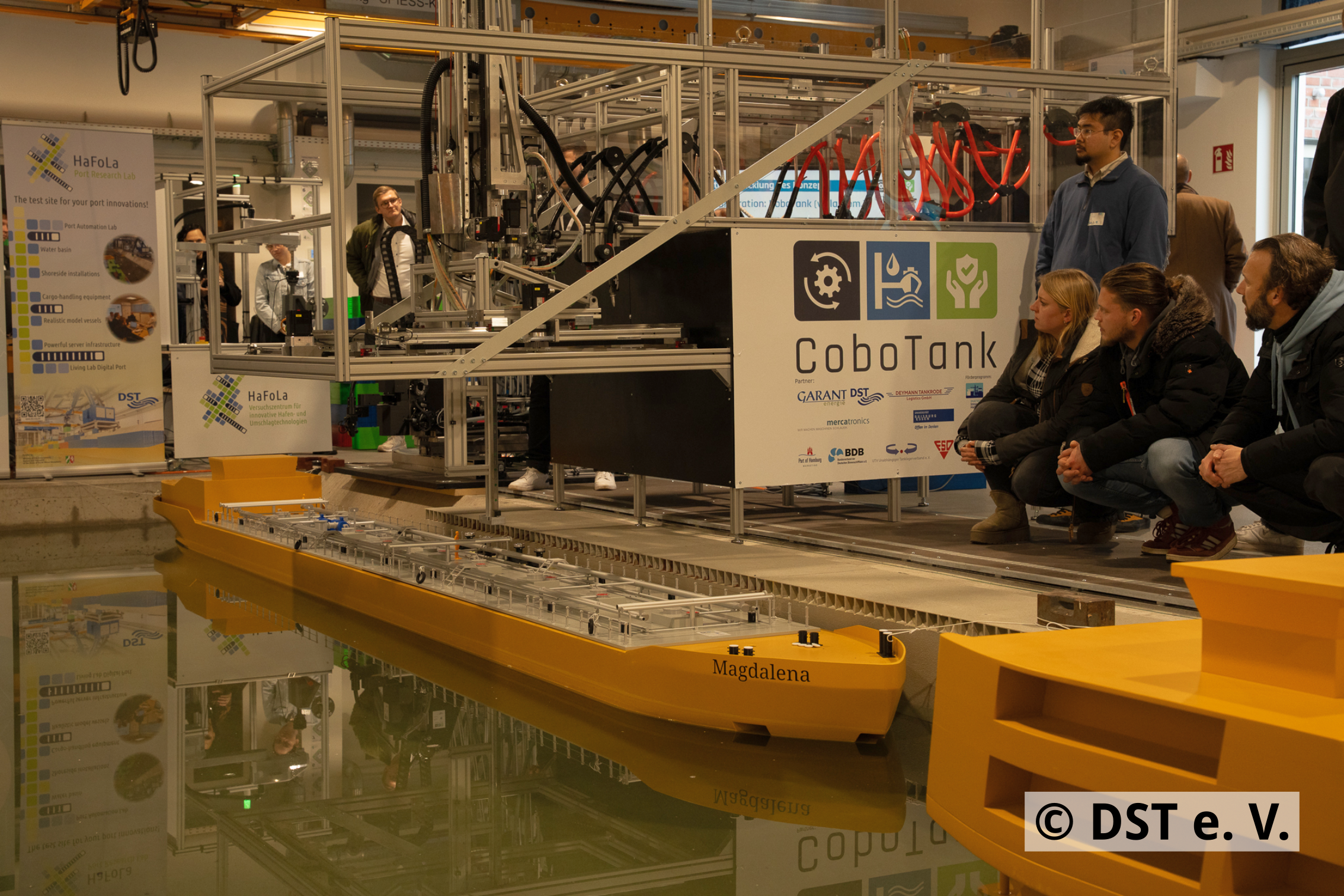
Das Projekt realisiert eine Teilautomatisierung unter Einsatz des CoboTanks, eines kollaborativen Robotersystems (Cobot), zur Unterstützung des Beladevorgangs von Binnentankschiffen. Dabei erfolgen die Aufnahme der Schlauchverbindungen, u. a. für die Ladung des Produkts und die Gaspendelleitung, aus einem Schlauchmagazin und ihre Übergabe an das Bordpersonal vollautomatisch, während die Bordbesatzung die Schlauchverbindungen kraftunterstützt durch den CoboTank zum jeweiligen Manifold (Schlauchanschlussstation) führen kann, um eine dichte Verbindung zwischen Binnentankschiff und Landseite herzustellen.

Der skalierte CoboTank (rechts) samt Steuerstand (mitte) zu dessen Feinpositionierung.
Eine solche Teilautomatisierung verspricht eine erhöhte Arbeitssicherheit, die Entlastung der Bedienenden in physischer und psychischer Hinsicht und eine verbesserte Prozesssicherheit und -stabilität.
Neben dem CoboTank wird der RoboTank, ein Roboter für einen vollständig automatisierten Beladungsprozess, entwickelt, um dem anhaltenden Trend zur Reduzierung der Besatzungsstärke Rechnung zu tragen und die Abfertigung perspektivisch unbesetzter Schiffe zu gewährleisten. Der vollautomatisierte Roboter wird im skalierten Maßstab realisiert, verifiziert und in diverse Probandenstudien eingebunden.
Der skalierte RoboTank zum vollautomatisierten Anschluss des Binnentankschiffs mit dem Tankterminal.
Durch einen interdisziplinären Ansatz unter Einbeziehung von Ingenieuren, Psychologen und Betriebswirten wird die Wirksamkeit und Akzeptanz der Lösungen gleichermaßen durch mehrere Entwicklungszyklen sichergestellt.
Alle Demonstratoren wurden infolge einer umfangreichen Anforderungsanalyse unter Berücksichtigung der VDI 2206 (Entwicklung mechatronischer und cyber-physischer Systeme) und weiterer thematisch relevanter Richtlinien, wie der VDI 2221 (Entwicklung technischer Produkte und Systeme) und VDI 2803 (Funktionenanalyse), entwickelt.

Das Projektkonsortium während eines Referenzbesuchs zur Anforderungserhebung im Tankterminal in Hamburg.
Die Demonstratoren werden zunächst als skaliertes Testsystem im Versuchszentrum für innovative Hafen- und Umschlagstechnologien (HaFoLa) aufgebaut und erprobt. Im Rahmen einer Verifizierung und Validierung werden Probleme auf organisatorischer und technischer Ebene des Konzeptes identifiziert, der Demonstrator entsprechend angepasst und anschließend wiederholt verifiziert und validiert, bis keine Probleme mehr gefunden werden. Anschließend wird der CoboTank (durch Konsortialpartner) im Realmaßstab umgesetzt.

Das Konzept des CoboTanks wurde von den Mitgliedern des UTV diskutiert und validiert.
Der RoboTank wird ungeachtet derzeit geltender rechtlicher Einschränkungen durch Gesetze und Verordnungen entwickelt, um somit die technische Machbarkeit einer effektiven (und möglichst effizienten) Lösung nachzuweisen.
Mit der abgeschlossenen Verifizierung und Validierung kann der RoboTank im Realmaßstab aufgebaut werden – nach dem Ende der Vorhabenslaufzeit.
CoboTank bringt insgesamt sechs Demonstratoren hervor, welche die potenziellen Lösungsbestandteile für den automatisierten Flüssiggutumschlag in der Binnenschifffahrt darstellen. Neben den skalierten Demonstratoren von CoboTank und RoboTank und dem Demonstrator des CoboTanks im Realmaßstab entsteht außerdem ein Demonstrator zur Kopplung und Abdichtung im Realmaßstab (RoboFlansch), ein Steuerstand zur Feinpositionierung des skalierten CoboTanks und ein Leitstand, welcher die Fernüberwachung von vollautomatisierten Systemen für den Flüssiggutumschlag erlaubt.

Der Steuerstand zur Feinpositionierung des skalierten CoboTanks.

Der Leitstand im Tanklager zur Überwachung der modifizierten Abläufe beim Flüssiggutumschlag.
Neben den technischen Ergebnissen wurden der aktuelle Prozess und dessen Veränderung durch die Demonstratoren ausführlich untersucht. So sind Prozessablaufdarstellungen für den aktuellen konventionellen Prozess, den teilautomatisierten Ablauf und für die vollautomatisierte Variante definiert worden.
Des Weiteren wurde – in Zusammenarbeit mit den assoziierten Forschungsvorhaben PortSkill 4.0 und DigiTank – im Rahmen einer Probandenstudie untersucht, wie sich die Interaktion zwischen dem Leitstand und der Bordbesatzung unter Verwendung des teilautomatisierten Cobots verändert und wie der dadurch zunehmenden Arbeitsbelastung im Leitstand entgegengewirkt werden kann.
Die in CoboTank entstandenen Demonstratoren, die Untersuchung der Prozesse sowie die Auswirkungen auf den Leitstand liefern eine Blaupause zur Teil- und Vollautomatisierung für Tanklagerbetriebe. Der RoboTank stellt außerdem einen wichtigen potenziellen Baustein für die Realisierung der vollautomatisierten Binnenschifffahrt dar.
Robotische Systeme, welche die (teil- bzw. voll-)automatisierte Handhabung mehrerer dedizierter Schlauchleitungen ermöglichen, werden erstmalig im Rahmen des Vorhabens CoboTank vorgestellt. Am Markt verfügbare Systeme, wie z. B. Marineladearme, ermöglichen den Umschlag einzelner Produkte, während die vorgestellten robotischen Demonstratoren das (teil- bzw. voll-)automatisierte Anflanschen beliebig vieler Schlauchleitungen ermöglichen.
Der RoboTank ähnelt der hafentypischen Struktur eines Portalkrans und kann sowohl teil- als auch vollautomatisch betrieben werden. Dabei erlaubt er im teilautomatischen Betriebsmodus die kollaborative Verwendung gemäß der derzeitigen Vorschriftenlage. Eine spätere Umstellung zum vollautomatischen Betriebsmodus kann somit ohne hohe Investitionskosten erfolgen.
Projektlaufzeit:
- Juli 2022 – Dezember 2025
Förderkulisse:
Projektwebsite
Projektkoordination:
- Marvin Budde, M. Sc.
E-Mail: budde@dst-org.de
Tel.: 0203 99369-76
Projektleitung:
- Cyril Alias, M. Sc.
E-Mail: alias@dst-org.de
Tel.: 0203 99369-52
Konsortialführung:
- Matthias Bindschus
Garant Energie GmbH
Verbundpartner:
- DST – Entwicklungszentrum für Schiffstechnik und Transportsysteme e. V.
- Garant Energie GmbH
- Deymann Tankrode Logistics GmbH
- Hafen Hamburg Marketing e. V.
- Mercatronics GmbH
- Universität Duisburg-Essen
Assoziierter Partner:
Assoziiertes Projekt:
Vorgängerprojekt:
Wiss. Publikationen:
Budde, M., Kerkmann, T., Alias, C., Zreik, H., & Henn, R. (2025). Developing a fully automated robot to conduct the loading process of inland tank vessels. 2025 21st IEEE International Conference on Mechatronic and Embedded Systems and Applications (MESA), 12–17.
DOI – Link
Budde, M., Alias, C., Kerkmann, T., & Henn, R. (2025). Comparing two Strategies to Convert the Manual Loading Preparation of Inland Tank Vessels to Collaborative Robot Operation. Smart Rivers 2025, Memphis, Tennessee, USA.
Link
Nieradzik, M., Nover, N., Budde, M., Staab, V., Hebinck, G., Alias, C., Diepenbruck, J., Liebherr, M., Schramm, D., & Bruckmann, T. (2024). Konzeptionierung eines teilautomatisierten Robotersystems für die Optimierung des Ladevorgangs von Binnentankschiffen. VDI Mechatroniktagung 2024, Dresden, Germany
Link
Medienspiegel:
|
Dieses Vorhaben wird aus Mitteln des IHATEC II-Förderprogramms des Bundesministeriums für Verkehr unter dem Förderkennzeichen 19H22004E (CoboTank) gefördert. |
 |